The NLC when it is completed will consist of two separate beam lines about ten kilometers in length. The beams from these beam lines are expected to converge to a diameter of only a few nanometers just prior to annihilation. One of many problems associated with such small beams is the slight movement of the earth (vibration). These vibrations cause the focusing magnets to move the beams off their collision paths. The earth itself is rather vibrationally quiet, but cars, construction, industries, and human activity in general contribute heavily to the small vibrations we will be concerned with when the NLC is completed. We focused on a prototype system that tested the electronics that may be used to measure the vibrations of the magnets.
The internal noise of the prototype system is the crux of this project. The internal noise of our static accelerometer (the final proposed device is an accelerometer), or double capacitor must be very small in order for us to be able to detect the tiny movements, we ultimately wish to detect. We will be concerned only with testing a frequency range between 5 Hz and 1 Khz, because that is the range the vibrations we are concerned with fall into. The signals the final accelerometer will generate from the nanometer ground vibrations are themselves very small. If noise caused by the electronics are not smaller than the signals generated by a movement of a couple nanometers then this proposed accelerometer will not work. Sara and I ran various tests on equipment that may be used to to detect and amplify the signals from the ground.
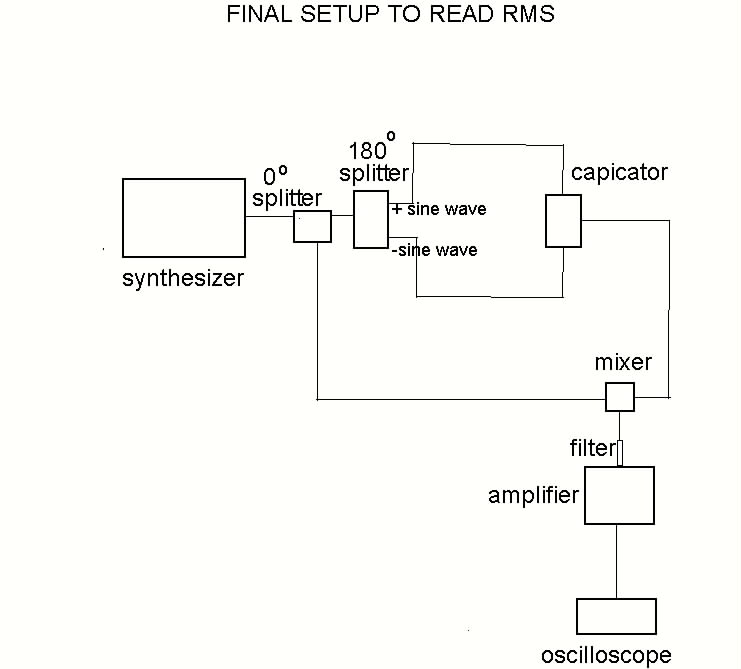
In order to test the internal noise of our Hewlett Packard ESG-D400A synthesizer, or signal generator, we send a signal of 50-megahertz and 10 dbm (an absolute measure of amplitude) from it through a 180 degree signal splitter. This kind of splitter takes a sine wave and splits it into two signals of equal yet opposite amplitudes. These two waves are then run through the system (see first schematic) first schematic) and are added back together before being mixed and amplified, with the SRS model SR 560 preamplifier, to show whether or not there is any noise generated by the synthesizer. To read signals we use a LeCroy 9420 dual 350 MHz oscilloscope or a HP 3478A multimeter which allows us to read voltage much more easily. If no change is observed then the system is quiet, but any kind of signal indicates that there is some kind of noise which needs to be taken into account. Note: it is very important to use coaxial cables of the same length and impedence (generally 50 ohms) when conducting these experiments other wise the signals may be out of phase by a different degree. If the error is small we can proceed with the same equipment, but if not the system itself will be fluctuating too much to give any kind of helpful readings and we need to come up with a more quiet generator. It is important to have the oscilloscope set to roughly 20 ms and 20 mV/division otherwise the signals would be seen on the oscilloscope.
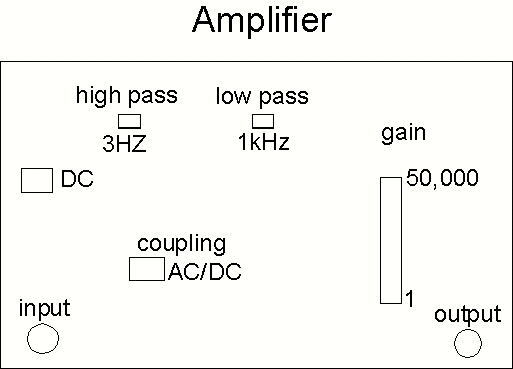
It is important that we determine bb what percentage the electronics of the synthesizer cause the signal fluctuations (noise),so we run two quantative tests on the synthesizer using both the oscilloscope and the multimeter (voltmeter). We leave the frequency at 50 mega-hertz and change the dbm to 10.52. We repeat the signal pathway from the first schematic, and send our signal down through the mixer where the frequencies are multiplied in such a way that we get both a high and low frequency signal. It is important to check the dbm going into the mixer, this can be done by running the signal into a powermeter set to dbm we used HP 436A for this. We only want the signal going into the L terminal to have a dbm of roughly 7 that is why we chose an initial dbm of 10.52 rather than any other value. For the R terminal we must decrease the dbm to roughly zero, we can do this by attaching an attenuator to the R terminal between the signal and the mixer. If we did not do this the mixer would not be acting as a proper multiplier for the tests we wish to run. We then attach a low pass filter which removes high frequencies from the signal,a standard 50-ohm resistor and an amplifier. Remember we want to study the frequencies between 5Hz and 1kHz because the vibrations we ultimately will be detecting occur in that range, so we choose an amplifier that can be set to a high pass range of 3Hz and a low pass range of 1kHz. The resistor precedes the amplifier to insure that the resistance of the system remains constant.
In the first of the two tests output signal is very small so we turn the amplifier gain up to 10 and put it on DC mode. Gain acts as the signal amplifier and in our case the higher the gain the less noise because of the type of amplifier we chose. (gain can also be defined as output over input). We want to see how much the voltage varies when we lower the dbm of the synthesizer by one. We read the voltage off the multimeter because it is much easier than trying to estimate it off the oscilloscope. For the second test we change the amplifier to AC mode and raise the gain to 10,000. We want to amplify the signal because it is very small and this amplifier should eliminate more noise if the gain is high. The problem is the amplifier cannot have very much voltage going through it so we can’t amplify DC currents very much without overloading the amplifier. In the AC mode all we need to do is read off a rms, which is the voltage fluctuation of the signal, off the oscilloscope. We then want to find a percentage by which the synthesizers amplitude fluctuates by comparing both sets of data to each other. We found that the output varies by about 0.0023%. This is very promising because the small percentage means that the synthesizer we are using will not hinder the measurements.
In the above manner we determined that the noise of the synthesizer would not hinder this experiment, however this is not the only noise test that we need to run. In the second test we set up a trial system which is identical to the final system we intend to set up, with the exception of the static accelerometer we must design and have built. In this set up we split the signal with a zero degree splitter. We run one part of the signal into the L terminal of the mixer, and run the other part into a 180-degree splitter before recombining the signal with another zero degree splitter. The second zero degree splitter holds the place of the static accelerometer. This test allows us to test the rest of our equipment to see if this is still a reasonable test for nanometer motions. We change the gain to see which gain value will give us the smallest noise output. The higher we set the gain the smaller noise output we expect to read because the high gain also helps to eliminate low noise. To calibrate the gain we set up a series of four 20 dbm attenuators (each tested for accuracy) which each shrink the input signal by a factor of 10. We then put the signal through the high gain amplifier and see if the expected value corresponds to the observed value.
This done we can proceed with the rest of the electronics test. We set the amplifier to a gain of 50,000 and the oscilloscope to 20 ms and 20 mV/division for this test. We know the thermal noise to be roughly 1.6E-20 Watt/Hz and can convert that to a distance measure thermal noise.. We know that if we come up with a value less than thermal noise then we’ve definitely done something wrong, because thermal noise level is the cleanest any system can be for a given frequency. We change the frequency from 50 to 25 MHz because it's a better test frequency for our static accelerometer and set the dbm so 7 goes into the mixer's L terminal. From this set up we take a RMS reading as output and read the input signal on the multimeter at a point preceding the 180 degree splitter, we can use these values along with an estimate of gap width to get a fluctuation distance of 0.084 nanometers which is well above the theoretical level and still well below the 1nanometer mark. This gives us hope because the regular electronics seem to be very clean, all we need to do now is focus on the steady state accelerometer.
In phase two of our project we had to design and have built a steady state mass that rests between two capacitave plates (see Canvas 5 sketch). 5 sketch). This device takes the out of phase signal (180 degrees) and recombines it in such a way that if the capacitances of the two capacitors are the same the signal should recombine to cancel eachother out. Before deciding on a size to make the device we first had to come up with a reasonable size to make it. We know that we want the resistance of the double capacitor to be about 50 ohms, and because we want to make something of reasonable size we expect that we will be using a signal of roughly 50 MHz. We calculated some diameters to determine what size disks would work well for our resistance and frequency limitations, and also be small enough to conveniently use. The following link is a sample calculation of capacitance which we used to get an idea of how we should construct our capacitor. We decided to make the brass disks with an outside diameter of 2 inches and a capacitive surface of diameter 1.5 inches with a set gap width of about 80 microns. That way when we generate the frequency of 25 MHz we can get a resistance of 50 ohms to keep the resistance of our system standardized.
The static accelerometer consists of a center mass and two capacitor plates all made up of brass, a relatively good conductor that does not form an oxide layer when exposed to the air. It is surrounded by a non-conductive plastic known as delrin which was chosen because it is relatively easy to machine. The hard part with this system is getting the gaps between the center mass and the plates to be the same especially since we are dealing with gaps that are on the order of a hundred microns. To remedy this problem a stiff C spring was implemented also made of the nonconductive delrin. When pressure is applied to the accelerometer via a micrometer the C is compressed, which enables us to keep track of how much we move the top capacitor plate. This spring allows us to center the mass manually so we can have equal capacitances and hopefully little noise. It is very important that the spring is not so springy that it creates motion as we close the gaps. See our capacitor.
Another concern is radio frequency or RF interference. This interference is all around us filling the air with background frequencies that could cause too much fluctuation in sensitive devices like ours. Therefore we need to shield our double capacitor from this radiation. This is an easy task. An aluminum tube with a thickness of about a centimeter works quite well insulating the double capacitor.
Upon receiving the double capacitor (static accelerometer) we had to run a series of diagnostics to check for burs (jagged edges) and slants (uneven surfaces) that would affect the capacitance in ways that would make this capacitor useless to future measurements. We need to know what the largest gap between our top and center plate was so we could set our bottom plate significantly closer to the middle plate. We first take a zero measurement by setting an ohm meter to beep when the surfaces come in contact with one another, by screwing down the micrometer we had set in our device down until it made first contact with the top plate, this is when the ohm meter beeps. This we document to keep as our zero mark. We then put the electrodes on the top capacitave plate and the center mass as we wound down the micrometer until we had first contact between the two plates. The distance between these two readings however is not necessarily the proper gap distance, because of the possible slant of the device. Knowing the slant is very important when dealing with such small distances because the capacitance can be affected greatly by the unevenness of the surfaces. Another consideration is the loss of capacitance by contact. We checked the slant by removing the spring and laying the capacitor against the plate, careful not to drop them or allow dust to settle on the surface. We then wound down the micrometer until we heard the beep of first contact between micrometer and top plate.
Knowing the upper gap with and without the spring we can safely set the bottom gap to about half of the top gap distance. This way we don’t have to worry about the capacitance of the lower plate being larger than the capacitance of the upper plate. In order to properly set the gap between the bottom capacitor and the center plate we used a shim. A shim is a material of a uniform thickness that can be used as a spacer between two other materials. We can actually use a piece of paper as our shim, because paper in general is very uniform and about a hundred microns thick. We placed a piece of paper with a thickness of 80 microns between the mass and the bottom capacitor, and glued the bottom in with five-minute epoxy
The plates have all been tapped with small screws so that we can attach the wires we need to make this a working device. We used semi-rigid coaxial cables of the same length to attach the capacitor plates, after we sodered 36 gauge magnet wire to the free cable end and to a terminal lug we could screw onto the plates. We did the same for the center plate except we did not have to worry about the length of the coax cable and we made the magnet wire as short as possible to keep any RF interference very small. These wires are very delicate and break easily so great care must be taken in their attachment, as I found out in breaking all my first attempts.
With everything in place we can now put the static accelerometer in the place of the second zero degree splitter and test the noise output of the system again. It is very important that we center the mass so we can get the smallest possible signal output. We can do this by setting the amplifier to DC mode and turning the gain down to one, as we center the signal on the oscilloscope by changing the distance on the micrometer. We also want to read off the change in voltage per micron, so we need to disconnect the amplifier and run the unamplified signal into the multimeter (with a 50-ohm resistor between the signal and multimeter). This extra resistor changes the voltage output by a factor of two, but it’s a known change and it keeps the resistance of the system at 50 ohms. We vary the distance on the micrometer and take voltage readings which allow us to not only get another reading of the center but more importantly allow us to get a relationship of voltage to distance. The next step is to recenter the plate and reconnect the amplifier and oscilloscope. We turn the gain up to 50,000 make sure the low and high pass are set correctly and take a RMS reading. see final fluctuation calculation.
The fact that we have final noise readings of less than a nanometer (0.435 nanometers, in the 5Hz to 1 kHz range) is very promising for the future of this type of feedback loop. Given more time it is quite possible that we could improve the resolution of the electronic system by adding more amplifiers, testing other possibly less noisy equipment or increasing gain. Increased resolution, however, isn't an issue. We will be able to detect nanometer motion on the magnets, of the fine focus, if we use this type of setup, with this type of equipment. There are still many details to be sorted out, for instance the final accelerometer system will also consist of a computer feedback loop that corrects for the vibrations as the next bunch of electrons or positrons comes down the pipe.
I would like to thank Josef Frisch for being my advisor, without his patience I don't think I could have learned as much as I have, Sara Waugh for being my partner and helping me with my computer anxiety, Doug McCormick and Knut Skarpaas for all their assistance with our project,
NLC Technical Page • Meeting Schedule • SLAC Home Page
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}